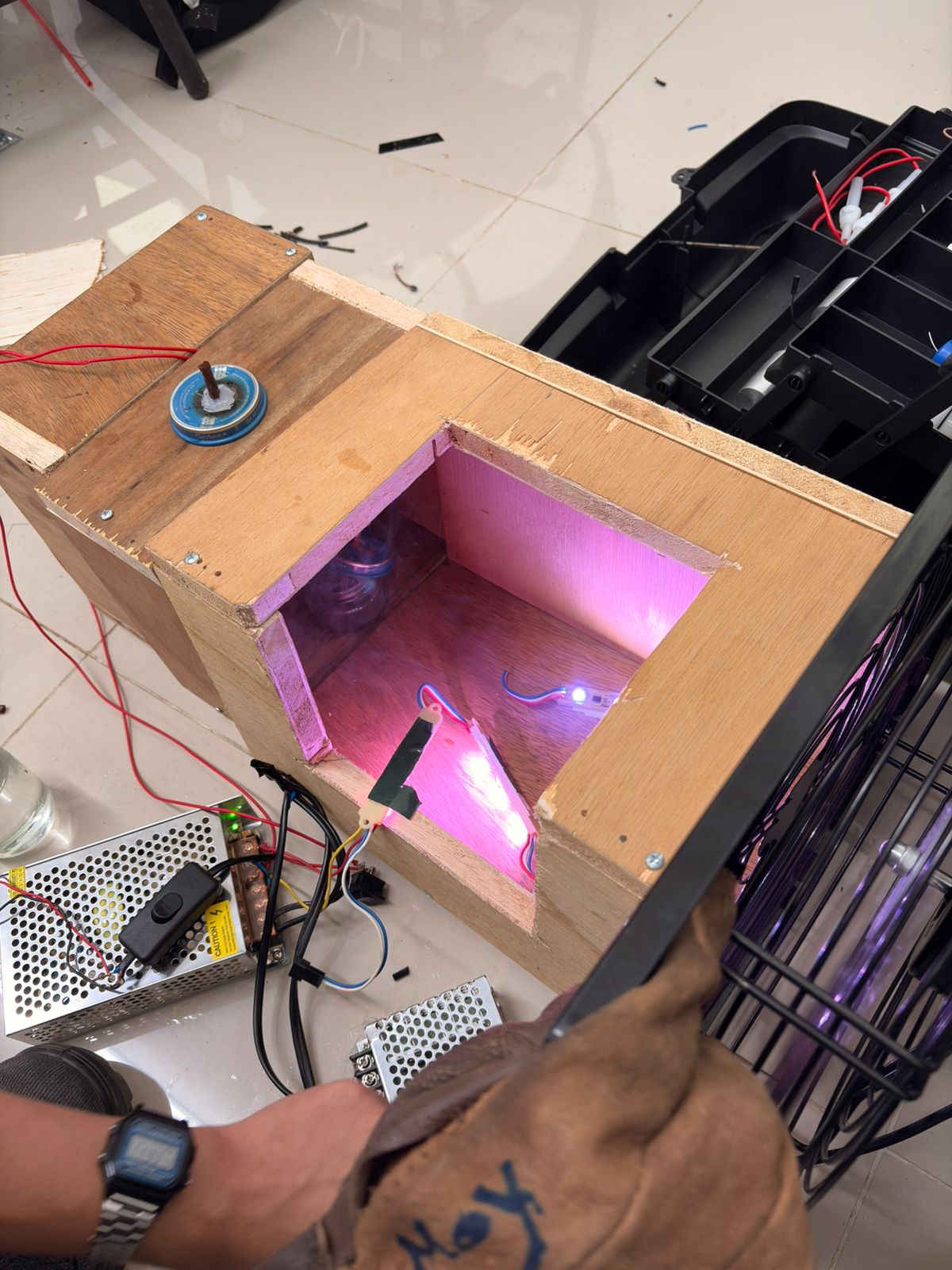
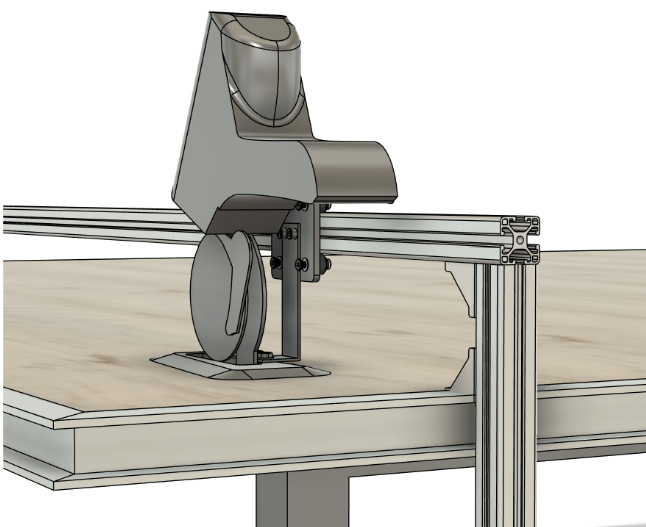
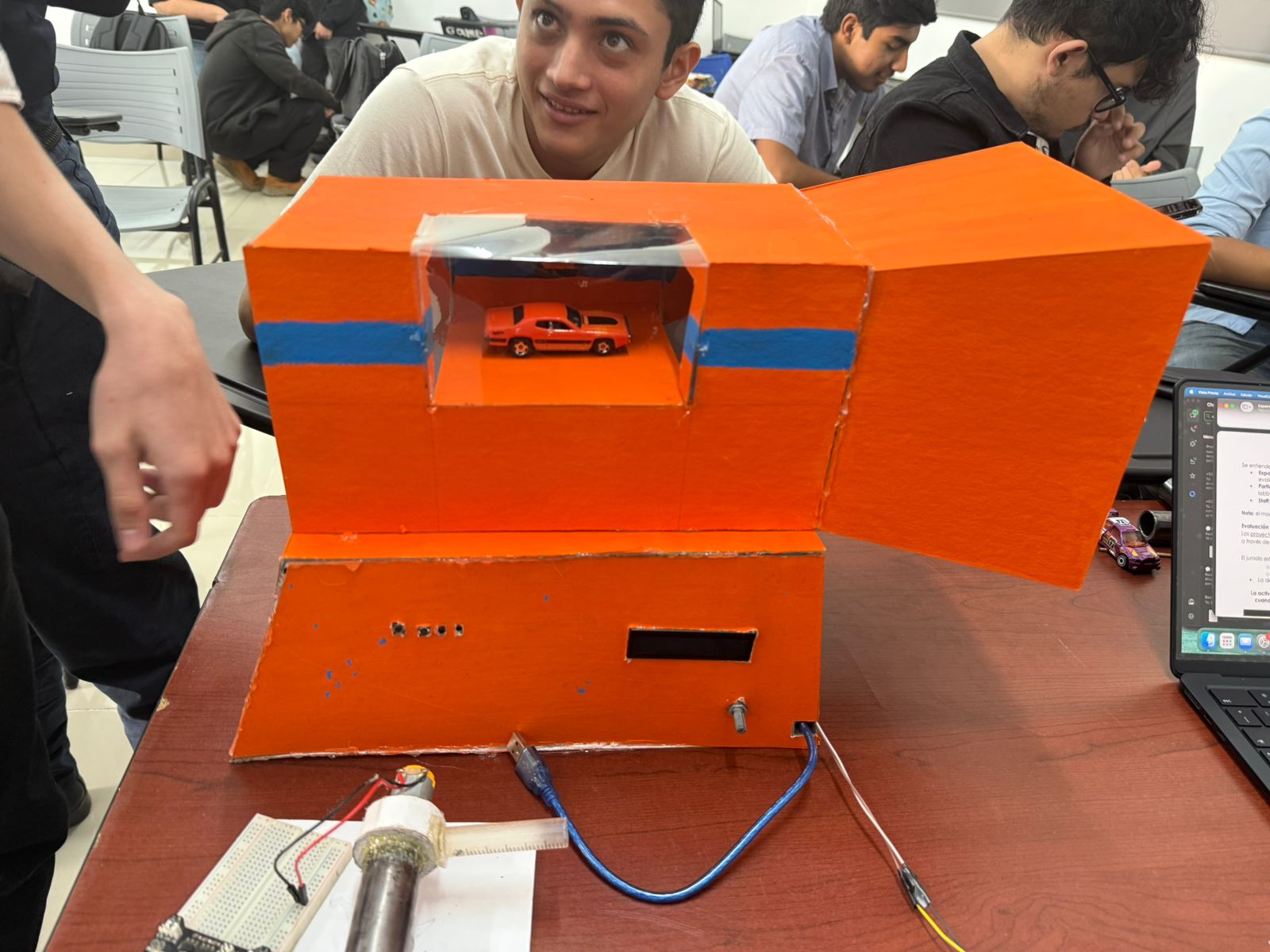
Este proyecto consiste en el diseño y construcción de un prototipo de túnel de viento de circuito abierto, desarrollado como herramienta didáctica y experimental para el análisis aerodinámico. El sistema consta de una cámara de contracción, una sección de pruebas transparente equipada con sensores de presión y una etapa de difusión optimizada para reducir turbulencias. Mediante un extractor de velocidad variable y un sistema de adquisición de datos, el prototipo permite medir las fuerzas de sustentación y arrastre en perfiles alares a diferentes ángulos de ataque. Es una solución de bajo costo diseñada para validar principios de la mecánica de fluidos de forma práctica.
Innovación tecnológica y prototipado