Innovación tecnológica y prototipado
Desarrollo de un sistema automatizado de traducción de voz a Braille mediante la reutilización de una impresora convencional y control de posicionamiento
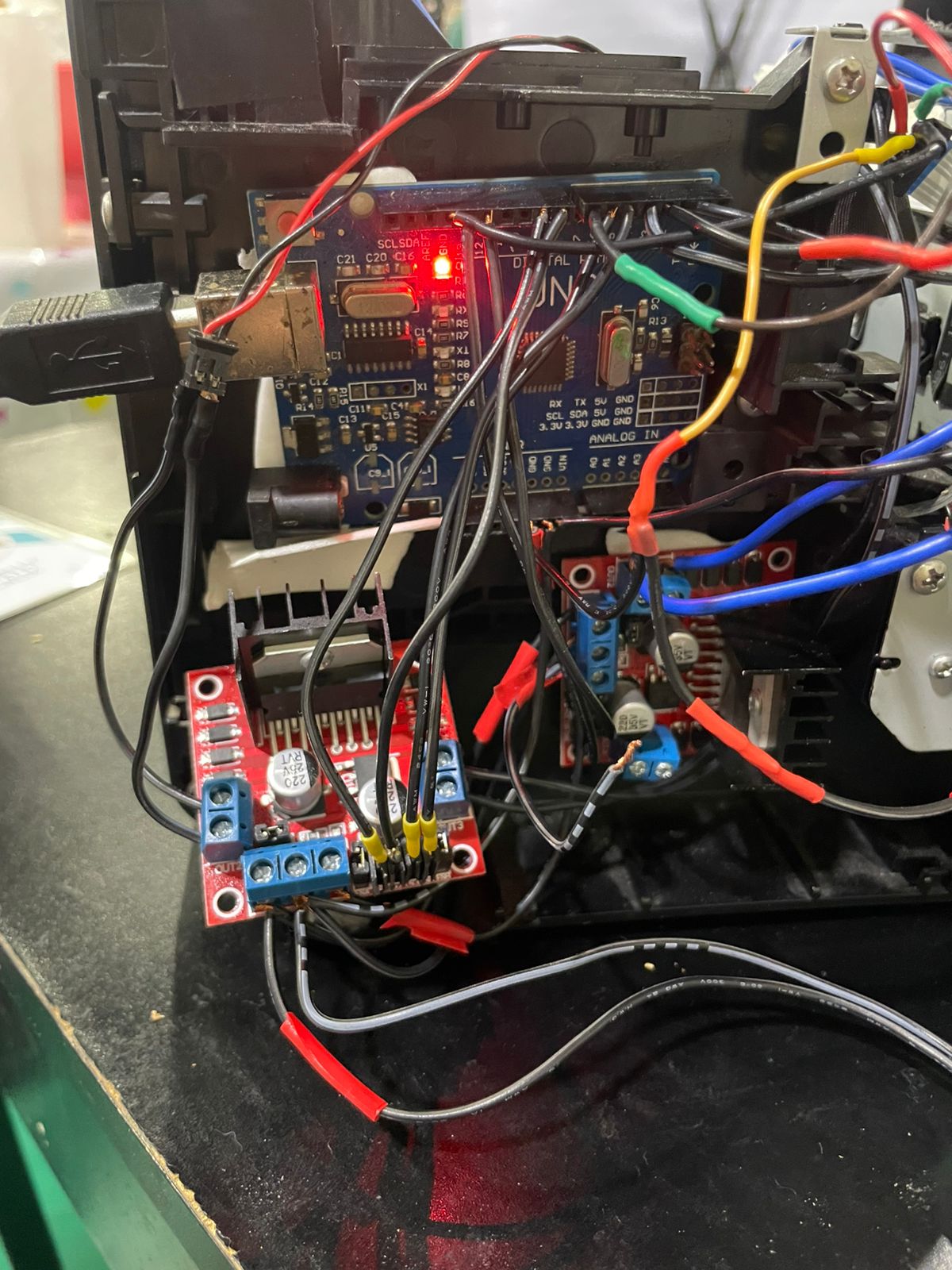
Desarrollo de un sistema automatizado de traducción de voz a Braille, implementado mediante la reutilización de los mecanismos mecánicos y ópticos de una impresora de inyección de tinta convencional. El sistema integra reconocimiento automático de voz, traducción a código Braille, generación de coordenadas de posicionamiento y un sistema de control de movimiento en lazo cerrado basado en encoders ópticos originales de la impresora. El hardware de control consiste en un microcontrolador Arduino Uno, un puente H L298N, los motores DC originales del equipo y una fuente de alimentación de 15 V. El control de posición implementa un algoritmo proporcional-derivativo PD que incorpora estrategias de posicionamiento FAST/FINE, compensación de backlash, zona muerta y limitador de velocidad, con el objetivo de reducir oscilaciones y mejorar la repetibilidad del posicionamiento.
Descripcion completa
Desarrollo de un sistema automatizado de traducción de voz a Braille, implementado mediante la reutilización de los mecanismos mecánicos y ópticos de una impresora de inyección de tinta convencional. El sistema integra reconocimiento automático de voz, traducción a código Braille, generación de coordenadas de posicionamiento y un sistema de control de movimiento en lazo cerrado basado en encoders ópticos originales de la impresora. El hardware de control consiste en un microcontrolador Arduino Uno, un puente H L298N, los motores DC originales del equipo y una fuente de alimentación de 15 V. El control de posición implementa un algoritmo proporcional-derivativo PD que incorpora estrategias de posicionamiento FAST/FINE, compensación de backlash, zona muerta y limitador de velocidad, con el objetivo de reducir oscilaciones y mejorar la repetibilidad del posicionamiento.
Relacionados