Innovación tecnológica y prototipado
Wachin Molesto
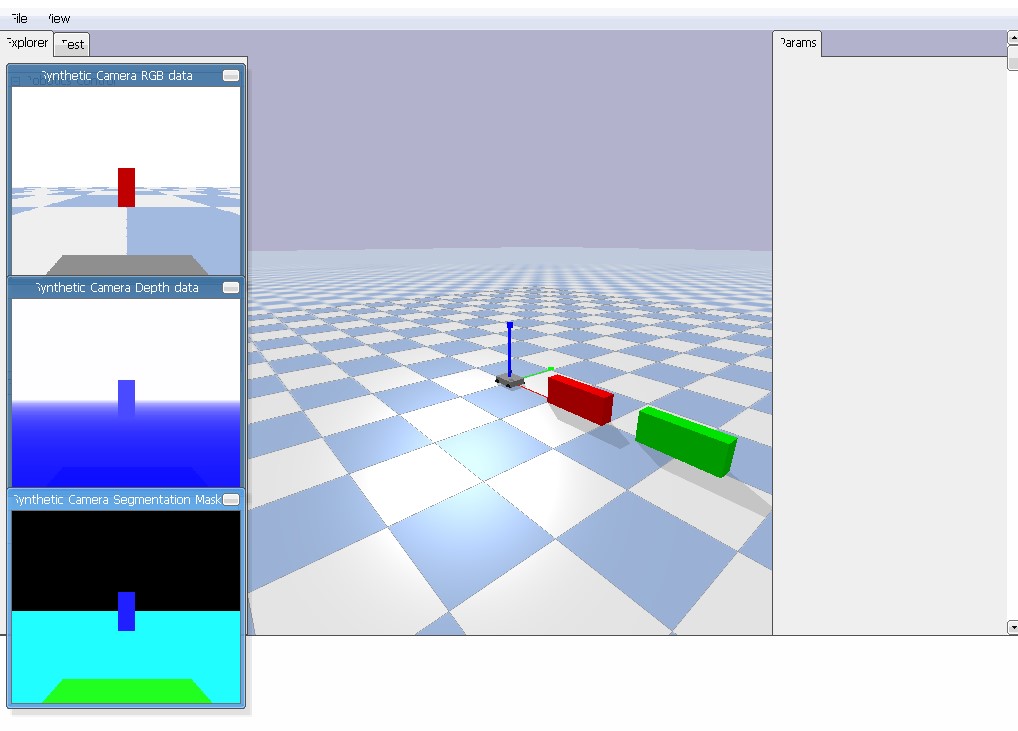
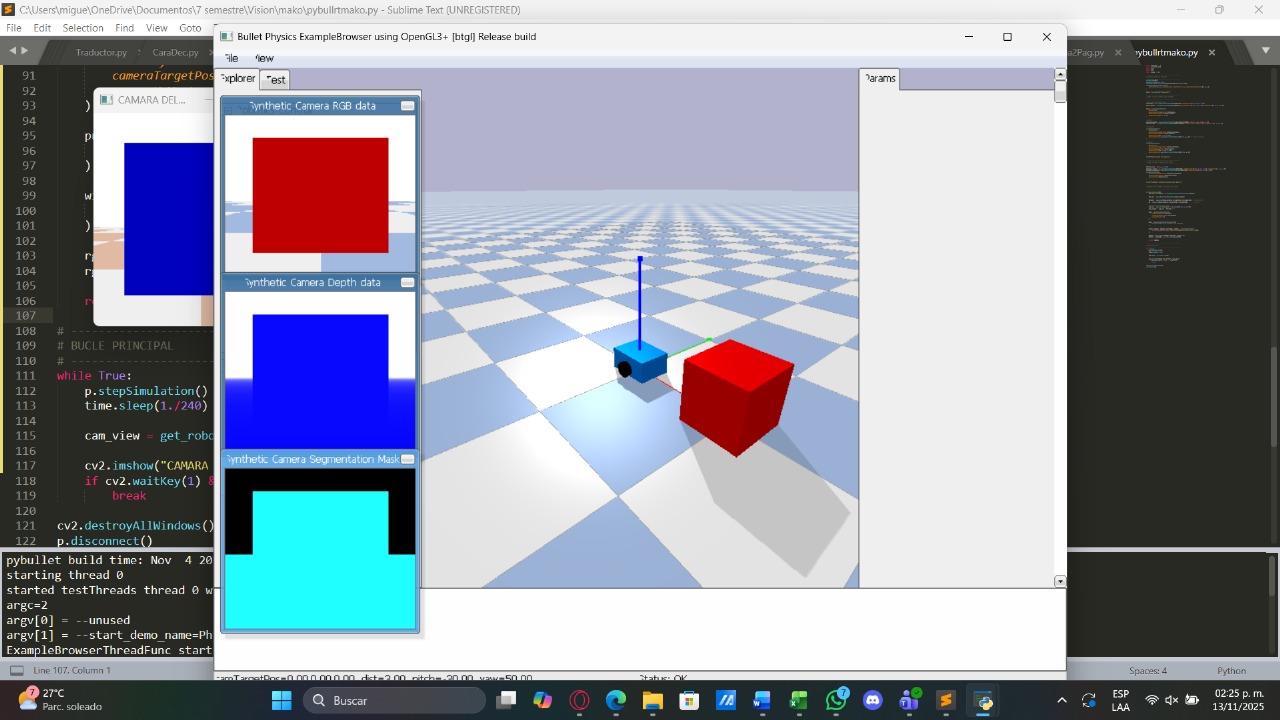
Este proyecto implementa un robot simulado en PyBullet que detecta y evita obstáculos exclusivamente mediante visión por computadora en Python. El sistema utiliza una cámara virtual para capturar imágenes del entorno y aplicar algoritmos de procesamiento visual para navegación autónoma. Este enfoque es relevante en ingeniería mecatrónica porque permite probar algoritmos de percepción y control sin necesidad de hardware físico, reduciendo costos y acelerando el desarrollo. Además, fomenta la integración de simulación, IA y robótica, habilidades clave en la automatización moderna. Favor de ponerlo al lado del proyecto de Linea de paletizado automatizado y de banco didactico de alternador de bombas (control), gracias!
Descripcion completa
Este proyecto implementa un robot simulado en PyBullet que detecta y evita obstáculos exclusivamente mediante visión por computadora en Python. El sistema utiliza una cámara virtual para capturar imágenes del entorno y aplicar algoritmos de procesamiento visual para navegación autónoma. Este enfoque es relevante en ingeniería mecatrónica porque permite probar algoritmos de percepción y control sin necesidad de hardware físico, reduciendo costos y acelerando el desarrollo. Además, fomenta la integración de simulación, IA y robótica, habilidades clave en la automatización moderna. Favor de ponerlo al lado del proyecto de Linea de paletizado automatizado y de banco didactico de alternador de bombas (control), gracias!
Relacionados