Innovación tecnológica y prototipado
Algoritmo Bug2
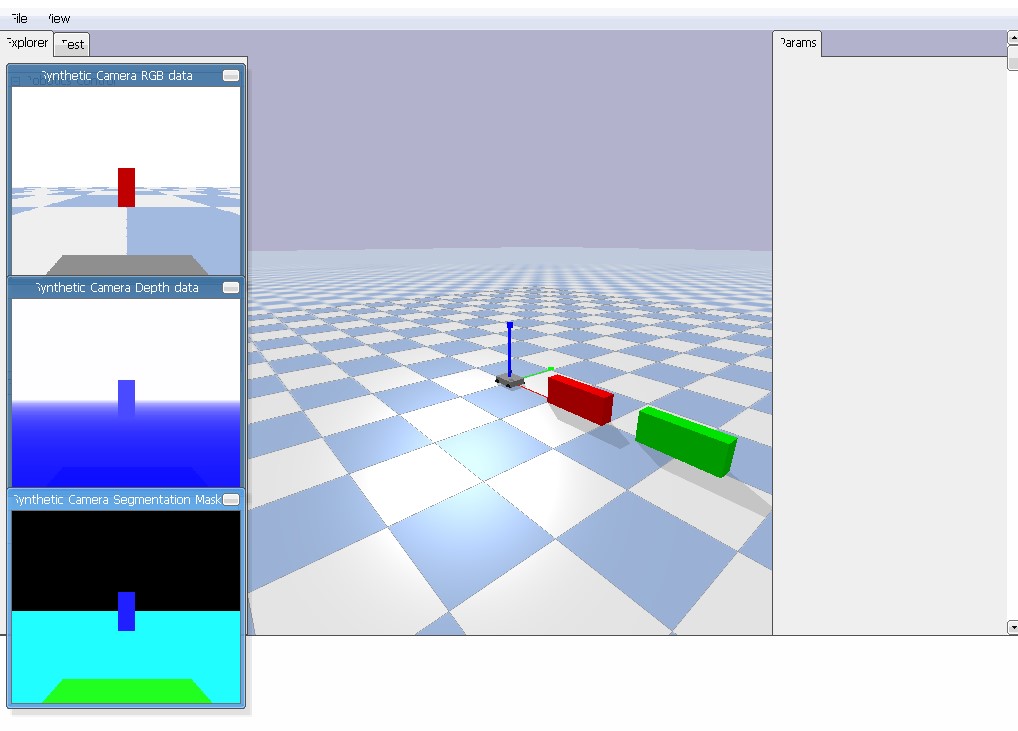
Este proyecto desarrolla un sistema de navegación autónoma para un robot móvil simulado mediante la implementación del algoritmo Bug2 en el entorno PyBullet. El robot, modelado en URDF y equipado con una cámara virtual, utiliza visión por computadora en HSV para detectar obstáculos y una meta dentro del entorno. A través del control diferencial y la lógica del algoritmo, el robot es capaz de desplazarse, esquivar obstáculos y dirigirse hacia su objetivo, evaluando su entorno en tiempo real. Es un proyecto enfocado en la integración de simulación, percepción y algoritmos de navegación autónoma.
Descripcion completa
Este proyecto desarrolla un sistema de navegación autónoma para un robot móvil simulado mediante la implementación del algoritmo Bug2 en el entorno PyBullet. El robot, modelado en URDF y equipado con una cámara virtual, utiliza visión por computadora en HSV para detectar obstáculos y una meta dentro del entorno. A través del control diferencial y la lógica del algoritmo, el robot es capaz de desplazarse, esquivar obstáculos y dirigirse hacia su objetivo, evaluando su entorno en tiempo real. Es un proyecto enfocado en la integración de simulación, percepción y algoritmos de navegación autónoma.
Relacionados