Innovación en productos y servicios
Vehículo guiado autónomo
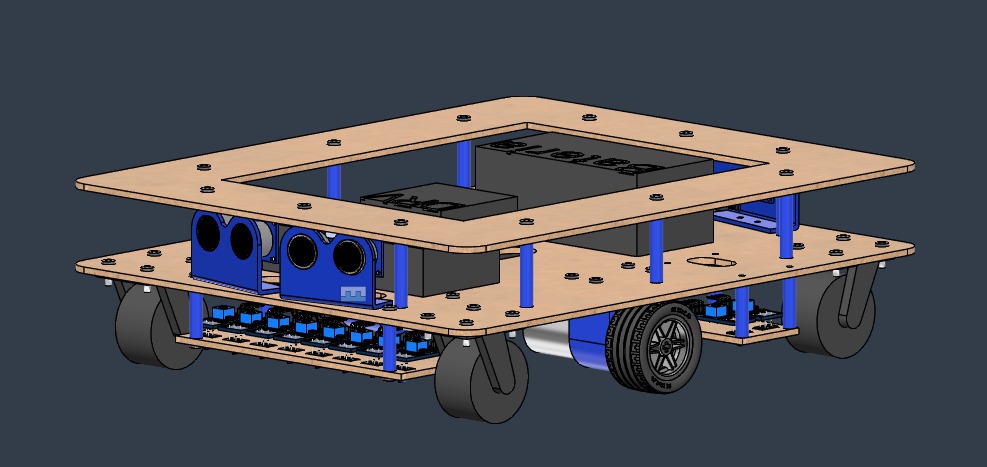
El proyecto consiste en el desarrollo de un Sistema de Vehículo Guiado Automático (AGV) basado en visión artificial utilizando marcadores ArUco para la identificación de estaciones de trabajo. El sistema emplea un teléfono Android como cámara embarcada, el cual transmite video en tiempo real a una computadora portátil donde se ejecuta un módulo de procesamiento mediante OpenCV. A partir del análisis del flujo de video, la computadora detecta los marcadores colocados en el entorno y determina el ID correspondiente a cada estación de destino. La computadora se comunica con una Raspberry Pi Pico W mediante una conexión USB serial, enviando las instrucciones de navegación derivadas del procesamiento visual.
Descripcion completa
El proyecto consiste en el desarrollo de un Sistema de Vehículo Guiado Automático (AGV) basado en visión artificial utilizando marcadores ArUco para la identificación de estaciones de trabajo. El sistema emplea un teléfono Android como cámara embarcada, el cual transmite video en tiempo real a una computadora portátil donde se ejecuta un módulo de procesamiento mediante OpenCV. A partir del análisis del flujo de video, la computadora detecta los marcadores colocados en el entorno y determina el ID correspondiente a cada estación de destino. La computadora se comunica con una Raspberry Pi Pico W mediante una conexión USB serial, enviando las instrucciones de navegación derivadas del procesamiento visual.