Innovación tecnológica y prototipado
Visión en sillas de ruedas "PowerChair"
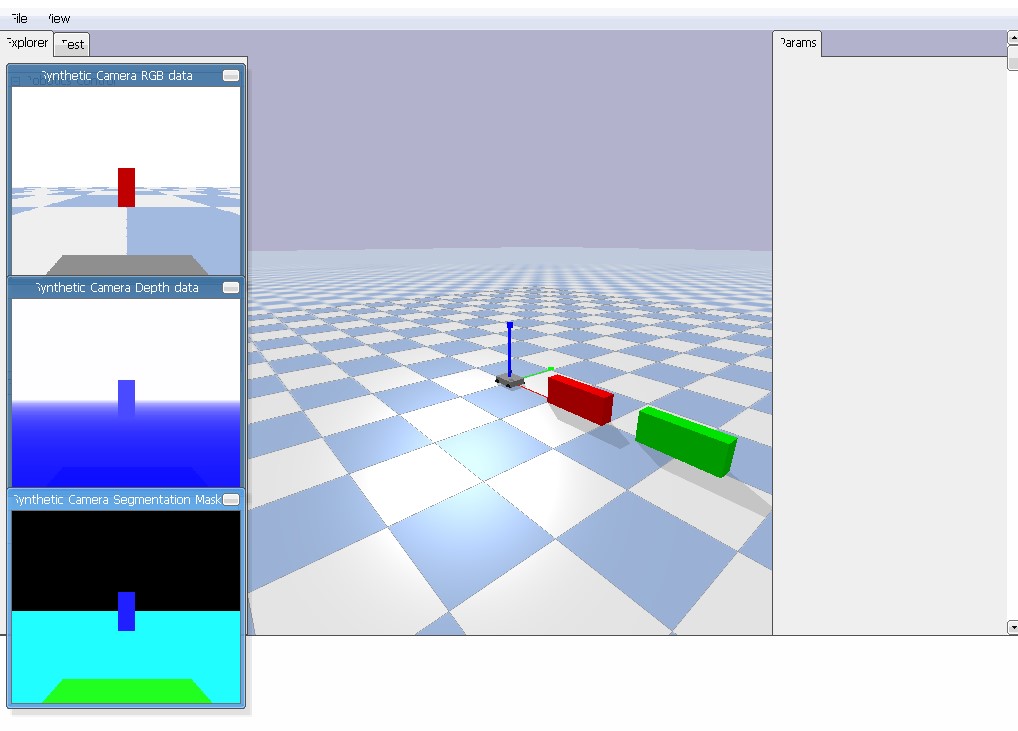
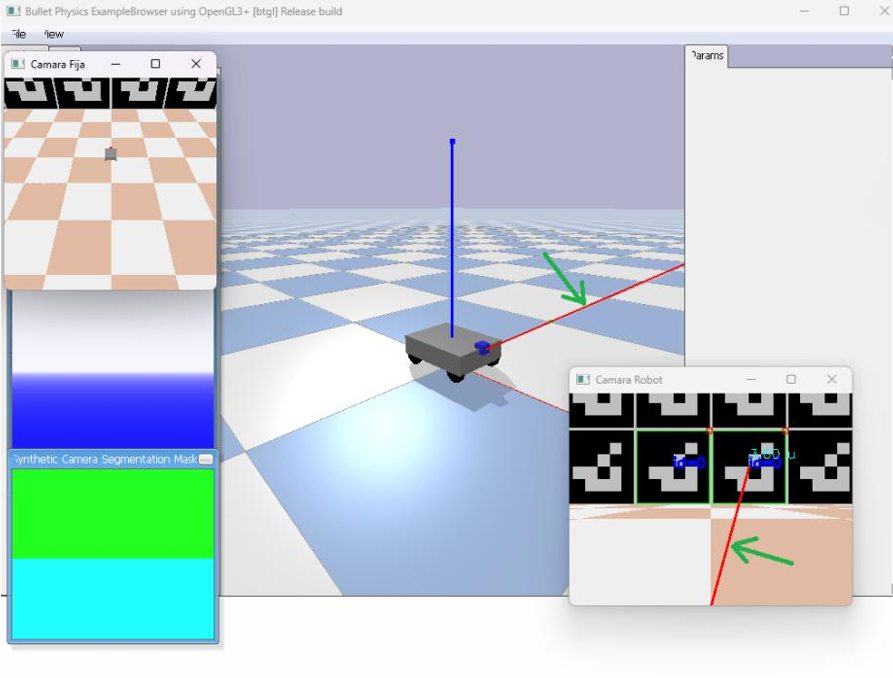
Este proyecto consiste en el desarrollo de una simulación interactiva en PyBullet, donde un robot móvil tipo carrito es controlado mediante un joystick conectado a un Arduino. El sistema interpreta los movimientos del joystick y transmite comandos vía comunicación serial hacia un script en Python, el cual controla la velocidad y dirección del robot. Además, se implementa una pared con textura de marcadores ArUco que permite la detección visual usando OpenCV. Una cámara virtual montada sobre el robot identifica los marcadores y calcula la distancia entre el robot y un ArUco específico, visualizándola con una línea y un valor numérico en tiempo real. El entorno también incluye una cámara fija que supervisa toda el área de trabajo. Este proyecto integra hardware, software, visión por computadora y simulación robótica, representando una solución funcional y educativa orientada al prototipado tecnológico.
Descripcion completa
Este proyecto consiste en el desarrollo de una simulación interactiva en PyBullet, donde un robot móvil tipo carrito es controlado mediante un joystick conectado a un Arduino. El sistema interpreta los movimientos del joystick y transmite comandos vía comunicación serial hacia un script en Python, el cual controla la velocidad y dirección del robot. Además, se implementa una pared con textura de marcadores ArUco que permite la detección visual usando OpenCV. Una cámara virtual montada sobre el robot identifica los marcadores y calcula la distancia entre el robot y un ArUco específico, visualizándola con una línea y un valor numérico en tiempo real. El entorno también incluye una cámara fija que supervisa toda el área de trabajo. Este proyecto integra hardware, software, visión por computadora y simulación robótica, representando una solución funcional y educativa orientada al prototipado tecnológico.
Relacionados