Innovación tecnológica y prototipado
Teleoperación Bilateral
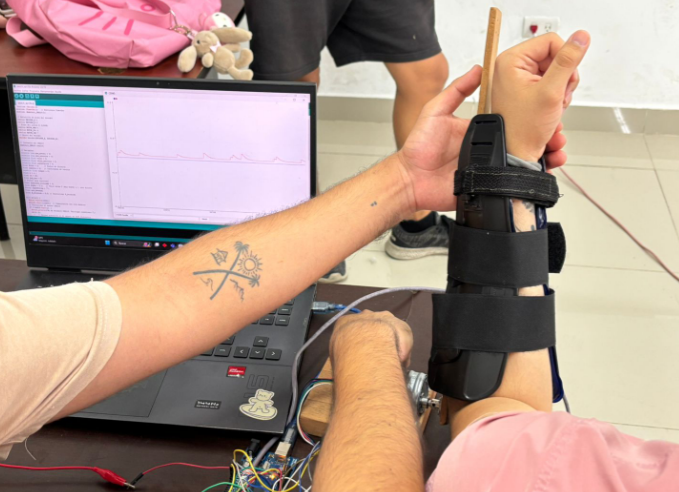
Para lograr un funcionamiento eficiente y seguro en exoesqueletos, es esencial contar con mecanismos de compensación que contrarresten fuerzas externas. Los actuadores cumplen un papel clave al generar movimientos más suaves y naturales en las articulaciones. Este proyecto busca implementar una conexión bilateral entre dos microcontroladores Arduino, permitiendo que un sistema maestro controle y replique el movimiento en un sistema esclavo. Esta comunicación maestro-esclavo representa un paso importante en el estudio de sistemas de control aplicables a exoesqueletos.
Descripcion completa
Para lograr un funcionamiento eficiente y seguro en exoesqueletos, es esencial contar con mecanismos de compensación que contrarresten fuerzas externas. Los actuadores cumplen un papel clave al generar movimientos más suaves y naturales en las articulaciones. Este proyecto busca implementar una conexión bilateral entre dos microcontroladores Arduino, permitiendo que un sistema maestro controle y replique el movimiento en un sistema esclavo. Esta comunicación maestro-esclavo representa un paso importante en el estudio de sistemas de control aplicables a exoesqueletos.
Relacionados