Desarrollo de Software
Sistema de verificación de rutas de un brazo robótico por medio de Arucos
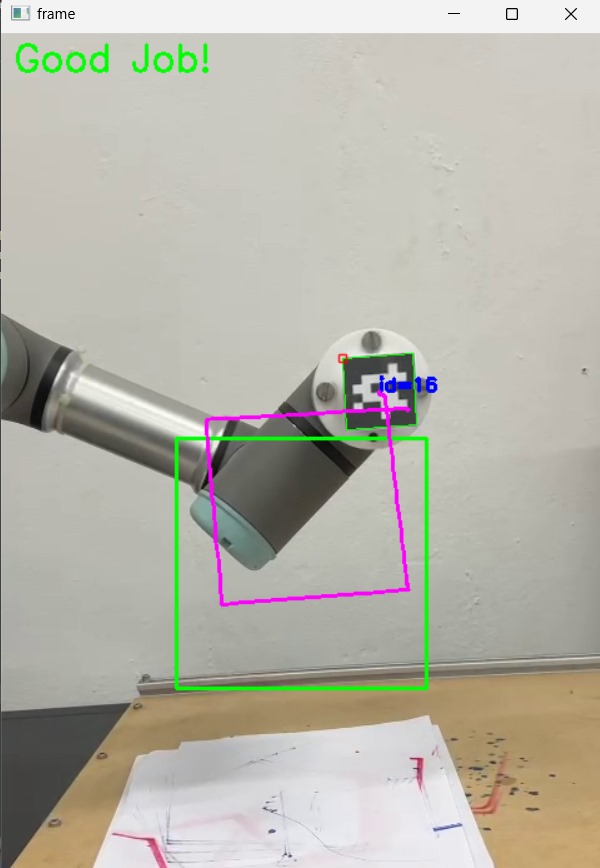
Desarrollo de un sistema para verificar la precisión de las trayectorias de un brazo robótico mediante el uso de marcadores "ArUco". Se realizó la programación del movimiento del brazo robótico modelo UR3e así como el código en Python que analiza el trazo generado por el marcador, una cámara visualiza la trayectoria y compara el resultado con la ruta esperada, si el brazo sigue la ruta correspondiente se mostrará un mensaje aprobatorio, en caso contrario se indicará que se debe de intentar nuevamente
Descripcion completa
Desarrollo de un sistema para verificar la precisión de las trayectorias de un brazo robótico mediante el uso de marcadores "ArUco". Se realizó la programación del movimiento del brazo robótico modelo UR3e así como el código en Python que analiza el trazo generado por el marcador, una cámara visualiza la trayectoria y compara el resultado con la ruta esperada, si el brazo sigue la ruta correspondiente se mostrará un mensaje aprobatorio, en caso contrario se indicará que se debe de intentar nuevamente
Relacionados