Creación de prototipo
BRAZO DE CIRUGÍA MINIMAMENTE INVASIVA
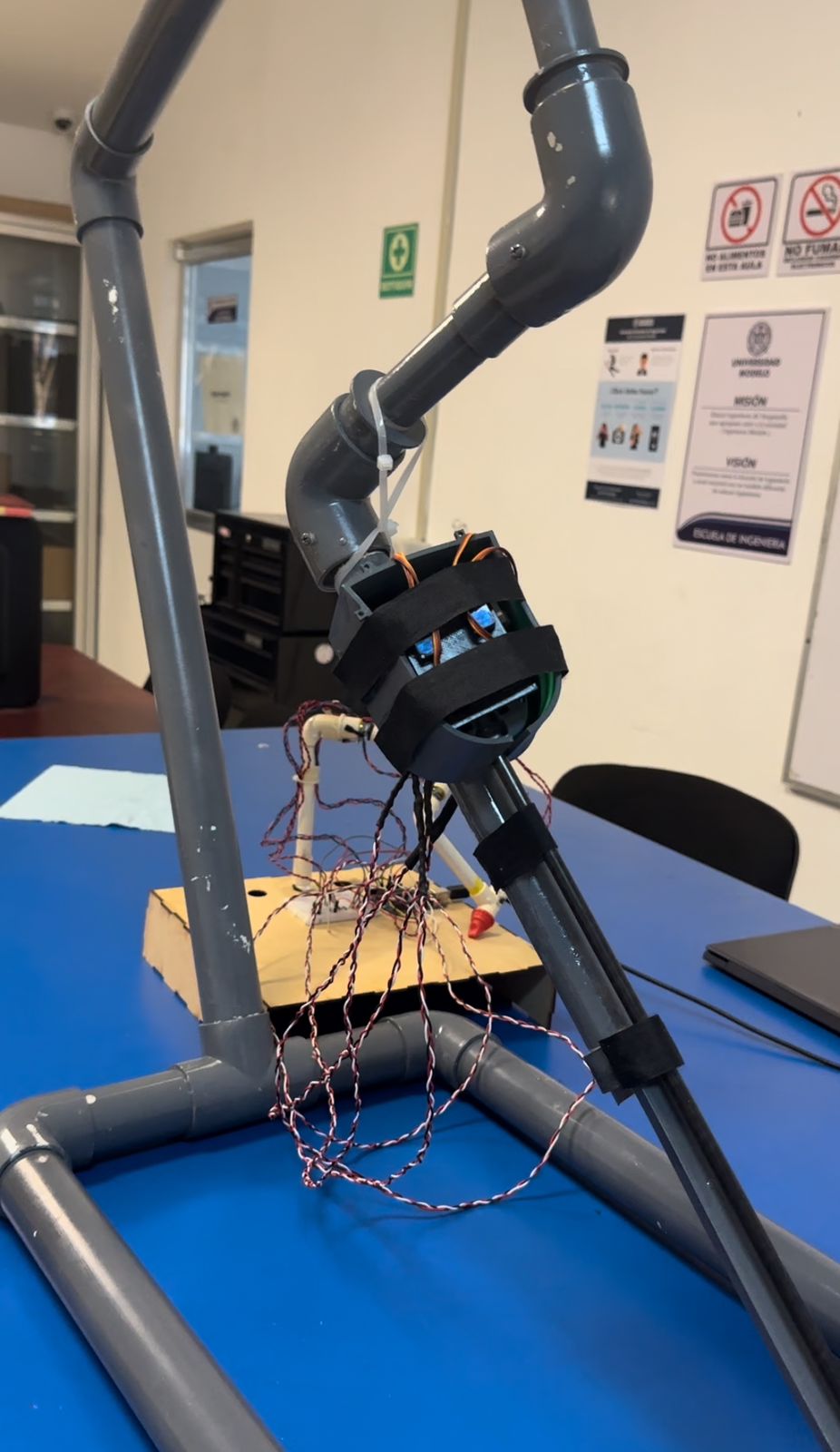
Se ha desarrollado un brazo quirúrgico que replica una pinza robótica utilizada en robots quirúrgicos comerciales, controlado por un scanner tipo joystick. El objetivo del proyecto es ofrecer una herramienta para la práctica previa al uso de robots quirúrgicos comerciales costosos o en casos de falta de acceso a estos. Este simulador permite a los usuarios adquirir experiencia en el control de brazos quirúrgicos, facilitando el entrenamiento y mejorando la competencia en el manejo de tecnologías avanzadas de cirugía robótica.
Descripcion completa
Se ha desarrollado un brazo quirúrgico que replica una pinza robótica utilizada en robots quirúrgicos comerciales, controlado por un scanner tipo joystick. El objetivo del proyecto es ofrecer una herramienta para la práctica previa al uso de robots quirúrgicos comerciales costosos o en casos de falta de acceso a estos. Este simulador permite a los usuarios adquirir experiencia en el control de brazos quirúrgicos, facilitando el entrenamiento y mejorando la competencia en el manejo de tecnologías avanzadas de cirugía robótica.
Relacionados