Creación de prototipo
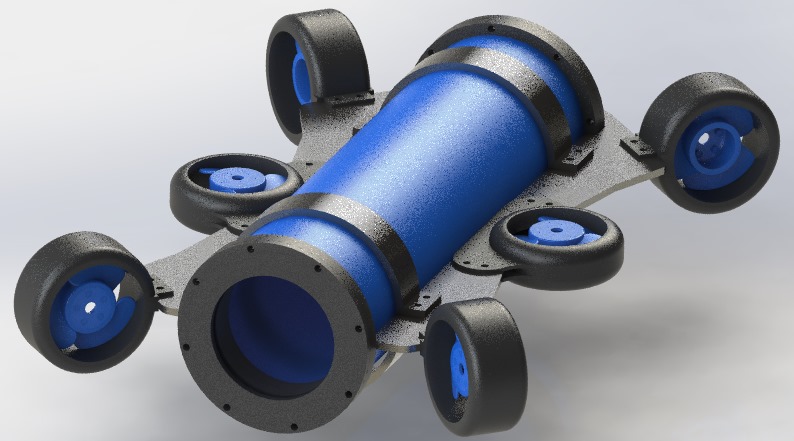
ROVerto, Drone para mapeo subaquatico
El vasto sistema de acuíferos y cuevas submarinas en la península de Yucatán carece de información detallada sobre su estructura, dificultando su conservación, las técnicas tradicionales de espeleobuceo y los ROV son costosas y riesgosas; Por lo que se propone desarrollar un ROV eficiente para explorar, mapear y conservar estos acuíferos. Este utilizará VSLAM para mapeo tridimensional y medirá profundidad, temperatura y salinidad. Se evaluará su desempeño y movilidad hasta 20 metros de profundidad para mejorar la comprensión y gestión de estos recursos naturales.
Descripcion completa
El vasto sistema de acuíferos y cuevas submarinas en la península de Yucatán carece de información detallada sobre su estructura, dificultando su conservación, las técnicas tradicionales de espeleobuceo y los ROV son costosas y riesgosas; Por lo que se propone desarrollar un ROV eficiente para explorar, mapear y conservar estos acuíferos. Este utilizará VSLAM para mapeo tridimensional y medirá profundidad, temperatura y salinidad. Se evaluará su desempeño y movilidad hasta 20 metros de profundidad para mejorar la comprensión y gestión de estos recursos naturales.
Relacionados